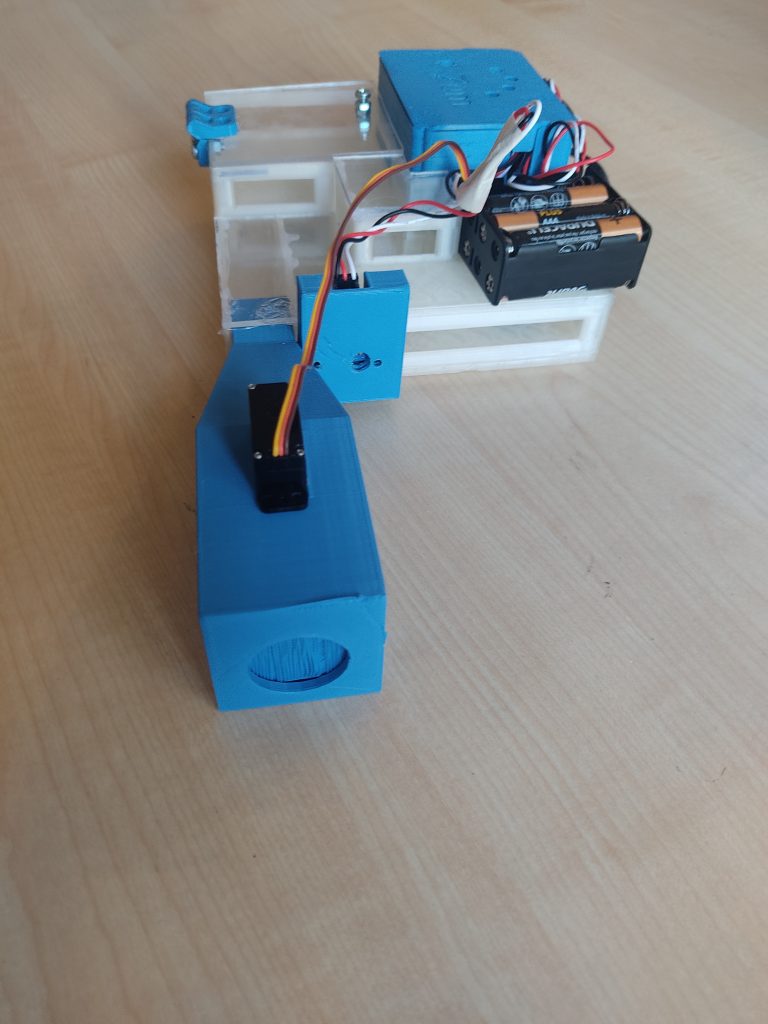
Finalment, hem arribat al concurs amb una trampa robotitzada per atrapar serps. Hem aconseguit fer funcionar un model gairebé imprès al 100% i a escala 1:2. Aquest model en detectar una serp amb dos sensors d’IR tanca la porta amb un servomotor i envia un missatge per bluetooth a l’app que hem creat per controlar el nostre artefacte.
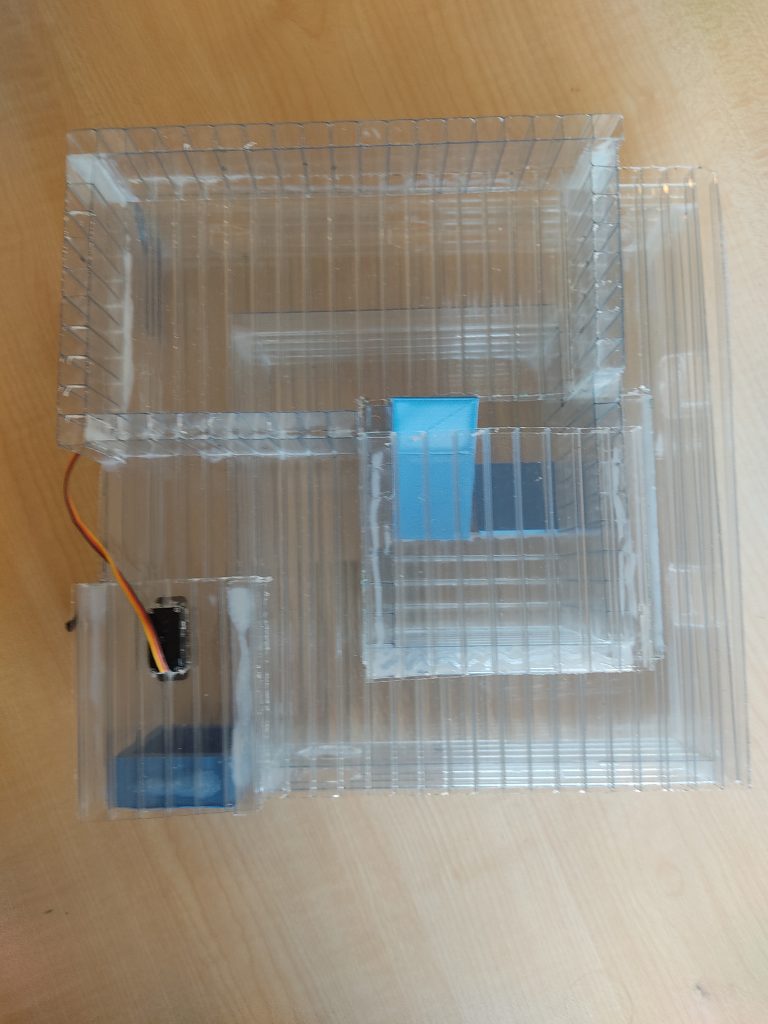
Per altra banda, hem desenvolupat el model 1:1 fet amb policarbonat i que pretén transmetre un SMS en detectar una serp. Aquest prototip no l’hem acabat i a hores d’ara hi estem treballant.