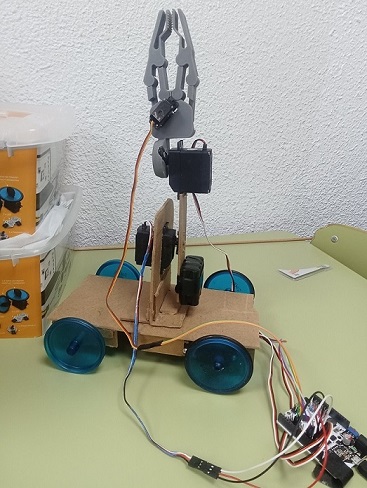
Nuestro autómata está listo. Un cuerpo de madera con una pinza de impresión 3D. Servos de rotación continua para controlar el movimiento de las ruedas y de las articulaciones y un servo 180º para abrir y cerrar la pinza.
El control se hace mediante bitbloq, aunque estamos teniendo problemas con la recepción de la señal de bluetooth ya que hay que apretar repetidamente los botones de la app.
Ya solo falta crear la misión para nuestro brazo.