Hace unas semanas realizamos el prototipo ya con los servos y la placa.
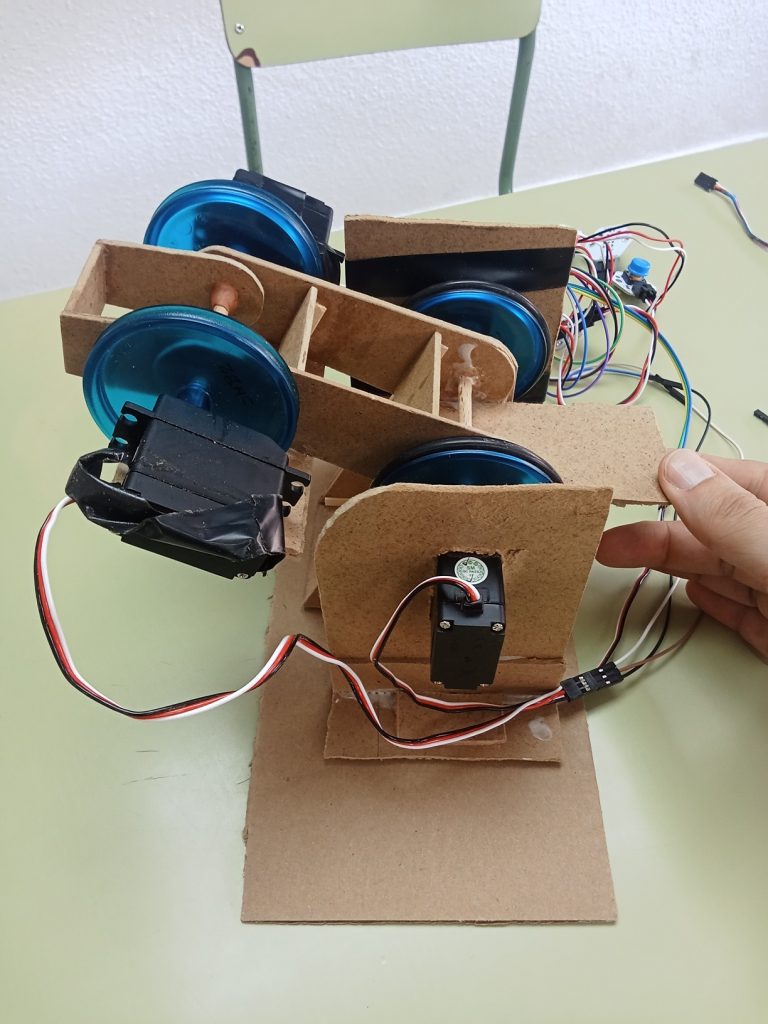
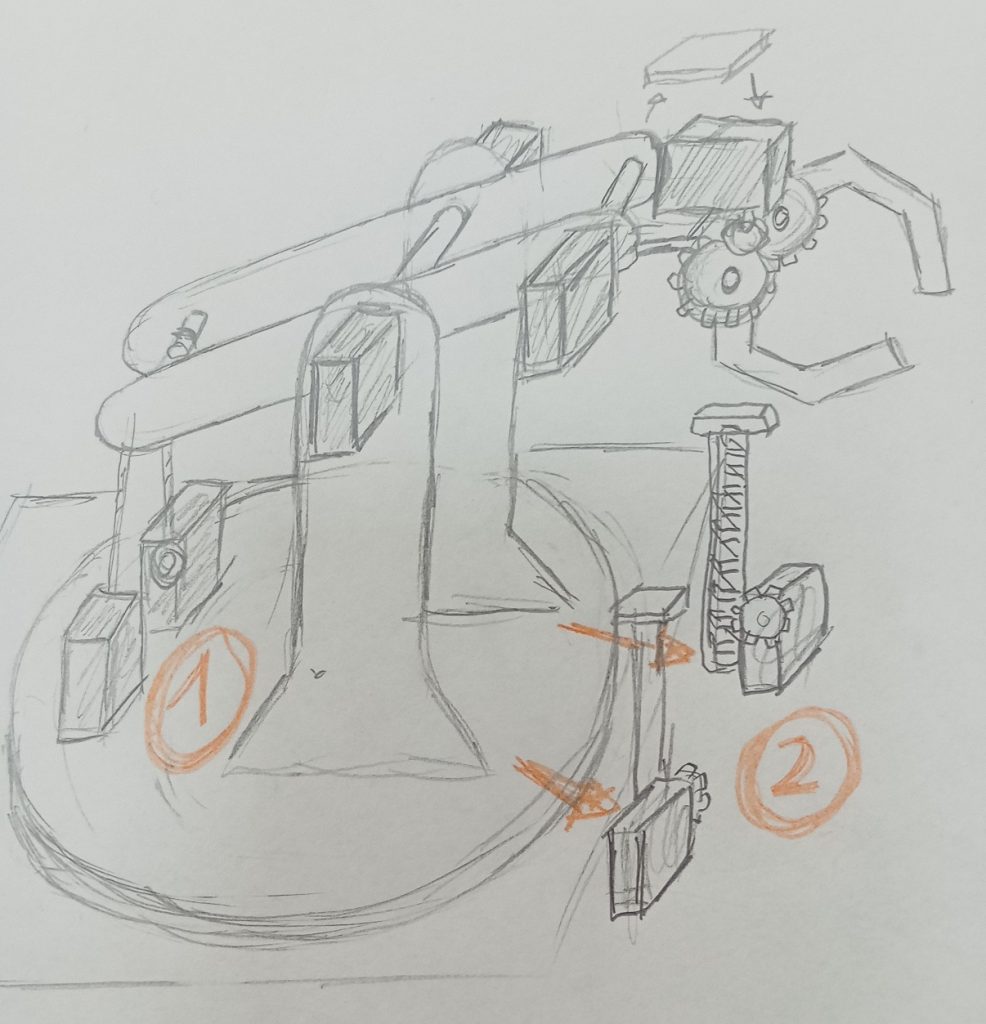
El brazo tiene dos articulaciones, cada una de ellas con dos servos. Faltaría montar la pinza con su servo en la parte de arriba. Por ahora lo estamos accionando con 4 pulsadores, para que las articulaciones giren en sentido horario y anti horario, pero queremos utilizar Bitbloq Pocket para poder moverlo desde el movil.
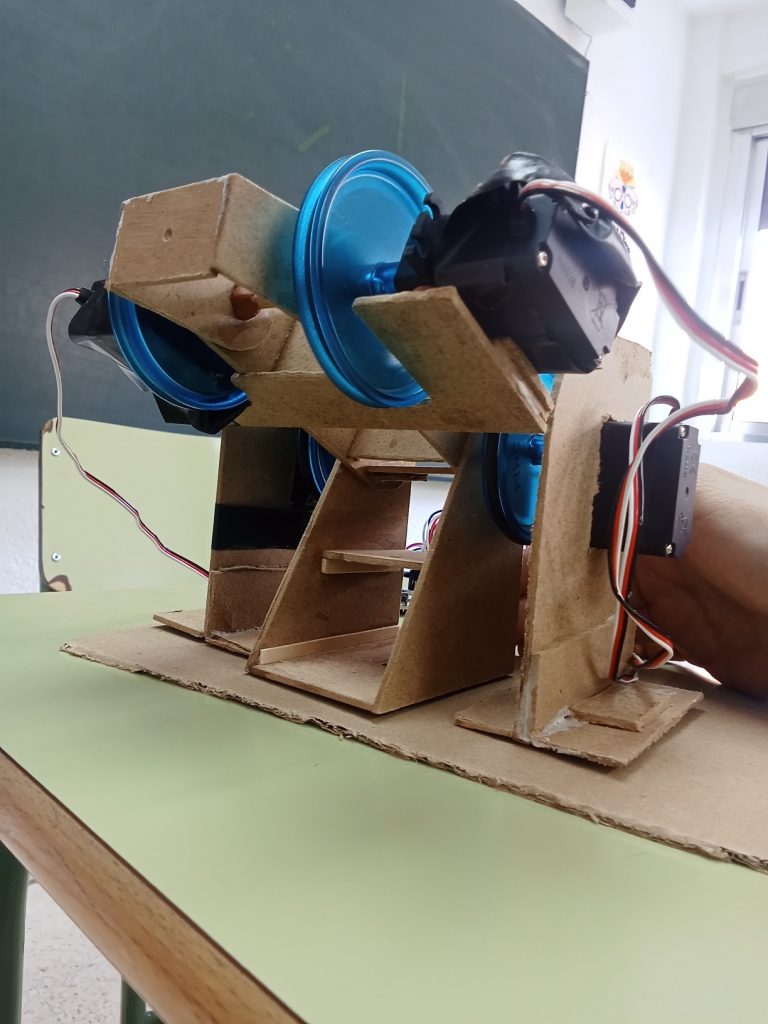
El problema que nos estamos encontrando es que el peso de la parte superior hace que le cueste doblar la articulación inferior, por lo que creemos que cuando coloquemos la pinza no va a poder levantarla. Para ello hemos pensado dos soluciones, unos servomotores que enrrollen un cuerda o imprimir un mecanismo tipo pinón-cremallera para que tire hacia arriba de la parte superior.