En nuestra primera entrada del blog vimos como construimos la estructura básica de nuestra cinta transportadora. Lo que hemos hecho desde entonces es ir puliéndola para conseguir la estructura definitiva.
Hemos observado que los perfiles de madera que sobresalen se comban hacia adentro cuando colocamos los rodillos, así que hemos decidido poner unos rectángulos de panel DM de refuerzo.

Los alumnos proceden a cortar y limar esos listones de DM. Después los atornillan y aprovechan para atornillar también las piezas que hemos imprimido en 3D para sujetar los servos.

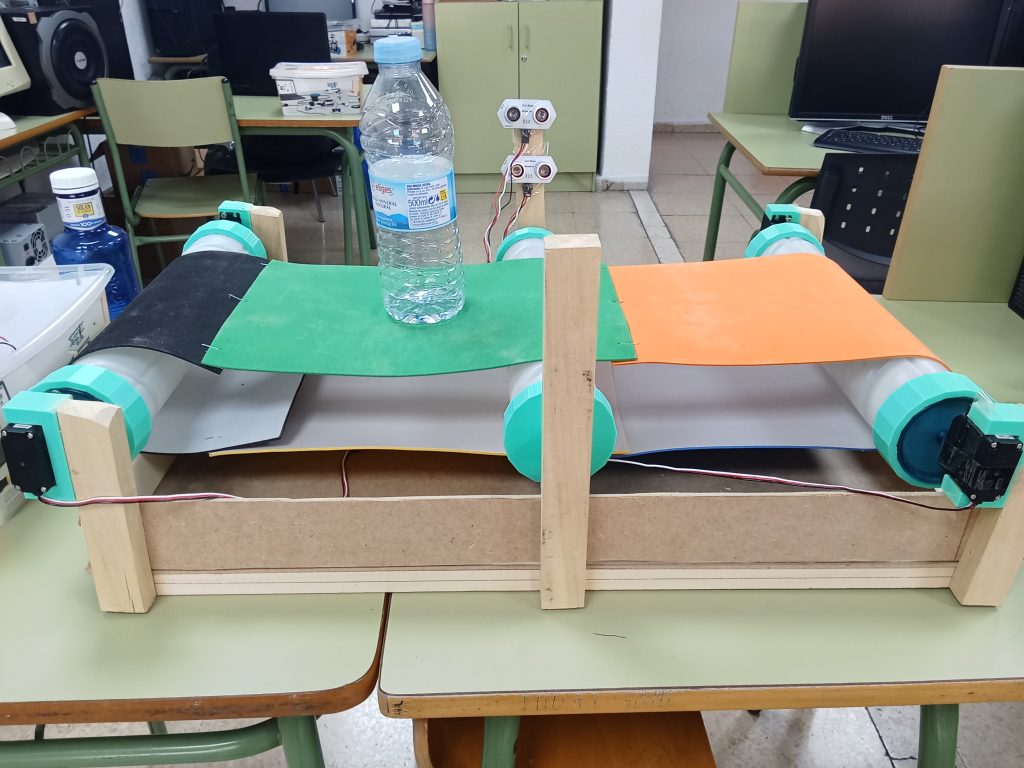
Además de trabajar en el armazón, hemos realizado pruebas con los sensores. La clasificación de envases (latas de refresco o botellas de agua) se hace utilizando la diferencia de tamaño entre estos envases. Colocamos los sensores a distinta altura y los unimos a la placa con cables Dupont para conseguir más distancia. Si los dos sensores detectan un envase es por que ha pasado por delante de los mismos una botella, que es más alta; en cambio si sólo el sensor colocado más abajo es el que detecta, lo que pasa por delante es una lata.