Tras varias sesiones de clase para que los alumnos estuvieran familiarizados con los kit Zum, procedimos a realizar la tormenta de ideas para decidir qué proyecto presentaríamos para el concurso.
Tras barajar varias opciones como turbinas o anemómetros, la idea más votada por los alumnos fue la de realizar un proyecto relacionado con el reciclaje y que pudiera llegar ser útil en el colegio. En concreto, un clasificador de residuos que sirviera para automatizar el reciclaje de envases como bricks, latas o botellas.
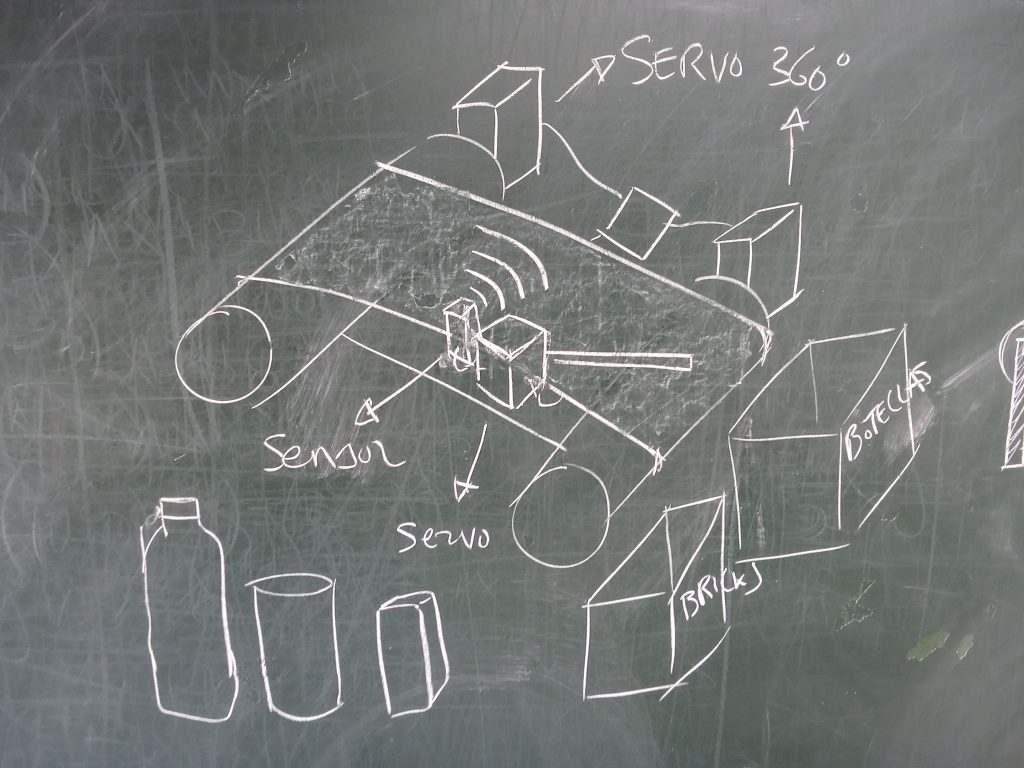
La máquina constaría de una cinta transportadora, unos sensores para distinguir por la altura el tipo de envase y unas barras que empujen los envases a las diferentes cajas.
En las primeras sesiones nos centramos en programar y construir la cinta transportadora. La cinta se acciona mediante un aplicación creada con Bitbloq App. Los rodillos que consiguen que la cinta se mueva se construyen a partir cartuchos de tóner vacíos de la fotocopiadora del colegio.

Para la superficie de la cinta probamos papel pero resbala con el plástico de los rodillos y no es suficientemente consistente. También probamos con unas láminas de goma EVA que funcionan mejor pero aún no nos convence como material definitivo.
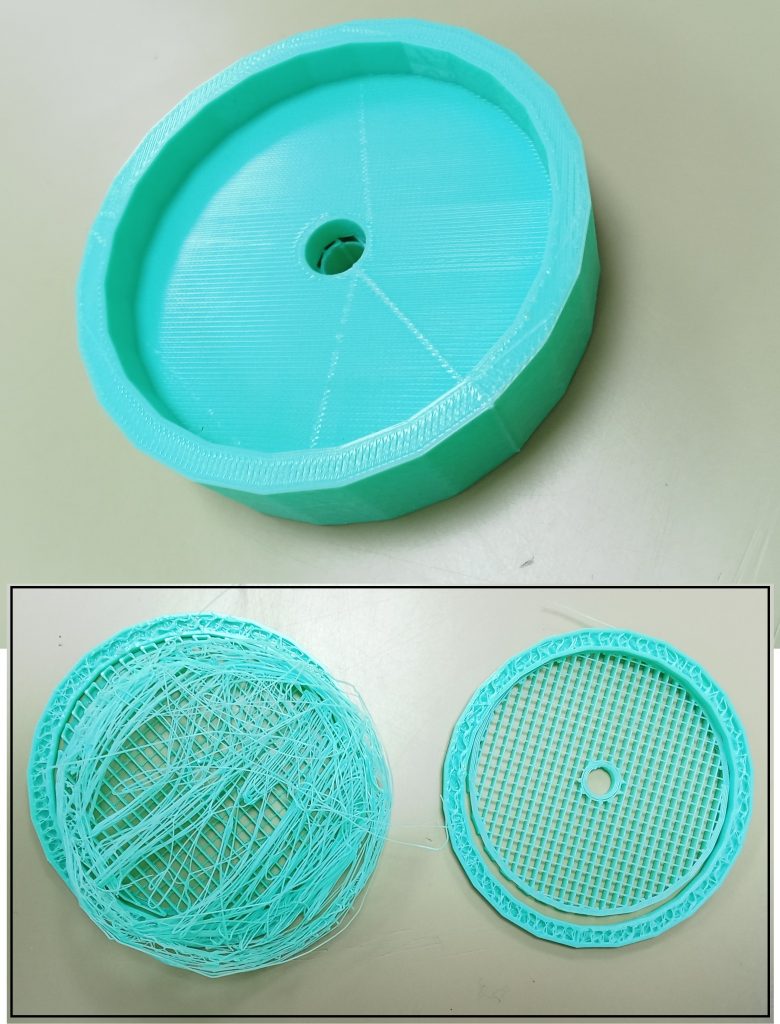
Los servos de 360º, que hacen que la cinta pueda rotar, se unirán a los rodillos mediante las ruedas del kit. Las primeras pruebas las hicimos pegando con celo las ruedas a los rodillos y aguantó bien. Sin embargo, se decidió crear una pieza de unión con las impresora 3D. Tras varias pruebas los alumnos observaron que para que el funcionamiento fuera óptimo, cada rodillo debía llevar dos servos con sentido de rotación opuesto.


Fijando uno de los rodillos a un silla y sujetando el otro, realizamos las primera pruebas de la cinta. En el vídeo uno de los rodillos está controlado mediante pulsador y el otro mediante la app, aunque posteriormente conectaron los 4 servos a una solo placa controlada con la app.
Interesante iniciativa y desde luego un gran reto.
Muchas gracias, nos da mucho ánimo para acabar de pulir el proyecto 🙂