Si algo hemos aprendido a lo largo de este curso es que no hay problema grande que no pueda ser resuelto como la suma de varios problemas más sencillos.
Cuando a principio del segundo trimestre decidimos que queríamos aplicar la robótica para mejorar las condiciones del aula frente al riesgo de contagio por SARS-COV-2 y evitar con ello enfermar de COVID-19 se nos antojó que quizás fuese un reto demasiado ambicioso.
Dedicamos los primeros días a estudiar las medidas preventivas que se habían publicado y nos dimos cuenta de que las de higiene personal, distanciamiento social, uso de mascarilla… dependían de nosotros mismos, pero que las relacionadas con la correcta ventilación de las aulas eran susceptibles de ser automatizadas y monitorizadas. Por tanto decidimos intentar automatizar un sistema de control de la ventilación del aula.
Una vez identificado el problema que queríamos resolver, lo primero que hicimos fue tratar de descomponer dicho problema en la suma de pequeños problemas que lo componen:
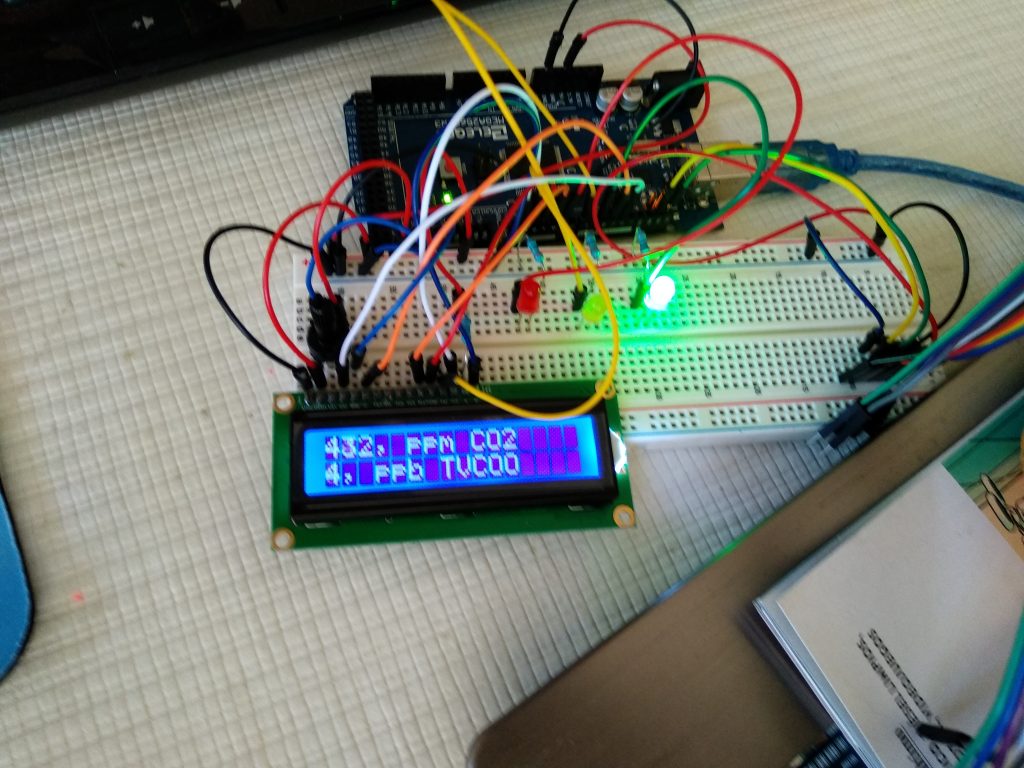
Controlar qué tal está la ventilación del aula en cada momento.
Notificar la calidad de la ventilación a los usuarios.
Abrir ventanas si fuese necesario.
Abrir puertas si fuese necesario.
Encender un sistema de extracción si la ventilación natural fuese insuficiente.
Encender un sistema de renovación de aire si con lo anterior no se alcanzase la calidad de aire requerida.
Tratar de eliminar del aire extraído y del aire de renovación, virus y bacterias si las hubiese.
Para el control de la ventilación:

C) Nos repartimos estos puntos y fuimos investigando cómo podríamos resolverlos por separado, qué sensores y actuadores necesitaríamos en cada caso, cómo habríamos de programar su control.
D) Una vez resueltos estos problemas aislados, acometemos la construcción de una maqueta del aula.

E) Integramos en la maqueta todos los componentes físicos necesarios para implementar las medidas propuestas y comprobamos que pueden funcionar juntos sin entorpecerse entre sí.
En este momento nos damos cuenta de que podríamos aprovechar para implementar unos botones de apertura automática de puertas y ventanas y así no tener que abrirlas de forma manual, de manera que se redujese el contacto físico con éstos elementos y con ello también el riesgo de contagio.
Sustituimos en la maqueta del aula la pantalla original del control de CO2 por unas luces LED y una alarma sonora mediante Buzzer para la notificación en tiempo real de la situación de la calidad de la ventilación. La pantalla no nos parece operativa ya que obliga a estar pendiente de ella y eso no es factible durante una clase.
También decidimos que a efectos de la maqueta del aula, y su uso para demostrar el funcionamiento del conjunto, vamos a sustituir el sensor de CO2 por un potenciómetro que nos permitirá simular a voluntad las variaciones en la concentración de CO2 asociadas a la calidad de ventilación del aula sin necesidad de tener que provocar un aumento real de CO2 junto al sensor, lo cual iría en contra de nuestra seguridad.
F) Aún tenemos que integrar en un único programa todos los programas separados, de manera que con una única placa controladora podamos gestionar todo el aula.
Es posible que en esta fase de programación surjan problemas de integración, control de tiempos de ejecución, etc. Debemos tratar dichos problemas para resolverlos y, si fuese necesario, replantear algunas partes del proyecto.
Os mantendremos informados…